Configuration du servomoteur
Exigence : Une carte PWM Adafruit 16 canaux/12 bits est connectée via I²C et un servo modèle est câblé à son premier canal PWM.
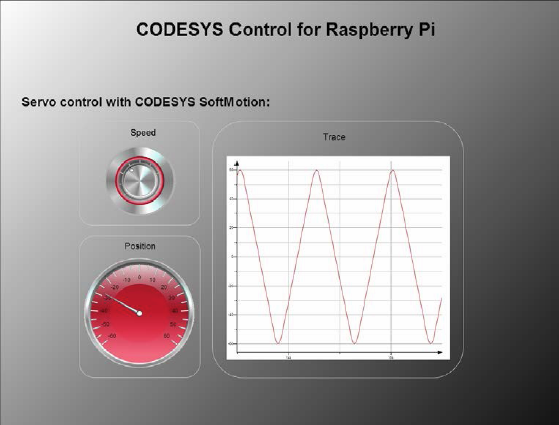
le SoftMotion Servo Example.project projet contient une application où CODESYS SoftMotion est utilisé en conjonction avec des modèles de servomoteurs. Une carte d'extension (Adafruit ID 815) connectée via I²C est utilisée comme interface de communication.
Ouvrez le
SoftMotion Servo Example.projectprojet et le mettre à jour.Dans l'arborescence des appareils, double-cliquez sur Appareil.
L'éditeur d'appareils s'ouvre.
Dans Paramètres de communication, Cliquez sur Analyser le réseau.
Si votre Raspberry Pi et le système de développement sont sur le même réseau, votre Raspberry Pi s'affiche pour la sélection.
Sélectionnez-le et cliquez .
L'application est téléchargée sur votre Raspberry Pi.
Démarrez le programme (appuyez sur la touche F5 clé).
Le servomoteur commence à tourner régulièrement de gauche à droite. le
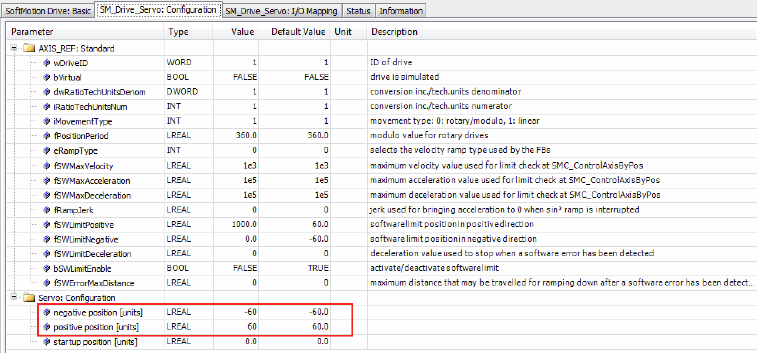
PLC_PRGprogramme mis en œuvre dans SFC est responsable de cela. Il active l'axe puis le déplace entre les positions -60 et +60 spécifiées comme positions finales dans leSM_Drive_Servoconfiguration des axes.La position prédéfinie est transportée via l'interface PWM, comme c'est le cas avec les servos de modélisation. Une impulsion HIGH, d'une durée comprise entre 1 et 2 ms, est émise avec une fréquence fixe (par défaut : 50 Hz ; paramètre de l'appareil Adafruit PWM SoftMotion). 1 ms correspond à la position finale inférieure et 2 ms à la position finale supérieure. La plage de mouvement varie d'un type de moteur à l'autre. Si le moteur est commandé en degrés angulaires, vous devez mesurer la plage de déplacement. Pour ce faire, conduisez jusqu'aux positions finales (dans l'exemple -60, +60) et entrez les positions mesurées dans l'écran de configuration :
Ouvrez n'importe quel navigateur (éventuellement sur un smartphone) et spécifiez l'adresse
<network address>:8080/webvisu.htm.La visualisation s'ouvre et affiche la position spécifiée générée. Vous pouvez contrôler la vitesse.